Ģeometriski nemainīgas un mainīgas sistēmas
Ekspluatācijas gaitā jebkura reāla būve ārējo iedarbību rezultātā kaut nedaudz maina sākotnējo formu un izmērus.
Viena no galvenajām prasībām, kas tiek izvirzīta jebkurai konstrukcijai, ir prasība, lai tā saglabātu savu sākotnējo formu visā ekspluatācijas laikā. Tam atbilst ģeometriski nemainīgas sistēmas.
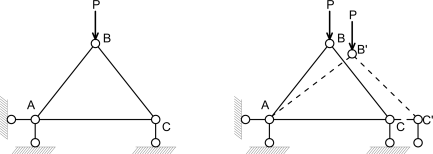
Sistēmas, kas sastāv no trijiem ar locīklām savienotiem stieņiem – locīklu trīsstūra (att. 1), forma nemainīsies ekspluatācijas laikā, jo trīsstūri viennozīmīgi var uzdot, uzdodot tā malu garumus. Tomēr, slogojot ar ārējo slodzi, šā trīsstūra forma nedaudz mainīsies sistēmas elementu deformēšanās rezultātā.
 att. 1
att. 1
 att. 2
att. 2
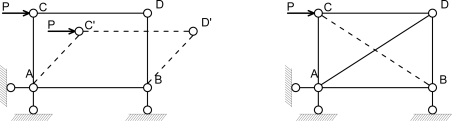
Lai novērstu sistēmas ģeometrisko mainību, sistēmā jāieved papildus saites, piemēram, viens vai otrs diagonālstienis (att. 2).
Tātad, piemēram, apskatot kopni, par disku var ņemt atsevišķu stieni, visu nemainīgu kopni vai tās nemainīgu daļu, kā arī zemi.
 att. 3
att. 3
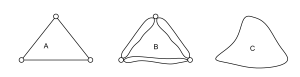
Jebkuru disku pieņemts attēlot kā patvaļīgas formas plakanu figūru. No struktūranalīzes viedokļa 3. attēlā parādītie gadījumi ir pilnīgi analogi. Visi viņi parāda ģeometriski nemainīgu sistēmu – locīklu trīsstūri. Par cik locīklu trīsstūris (figūra A) ir ģeometriski nemainīga sistēma, mēs to varam ņemt par disku (figūra C). Tikpat labi par disku var ņemt arī katru sistēmas stieni (figūra B).
Tātad kustības brīvības pakāpe tiek rēķināta attiecībā pret zemi.
Lai samazinātu sistēmas kustības brīvības pakāpi varam izmantot sekojošas saites:
a) pirmā veida saite – stienis ar locīklām galā (att. 4). Šādā saitē var rasties reakcija stieņa ass virzienā un šāda saite ierobežo divu disku savstarpējo pārvietojumu virzienā, kas sakrīt ar stieņa virzienu. Pirmā veida saite samazina sistēmas kustības brīvības pakāpi par vienu vienību:
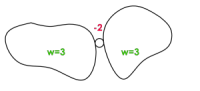
b) otrā veida saite – vienkārša cilindriska locīkla. Šādā saitē reakcija vispārīgā gadījumā var rasties patvaļīgā virzienā.
Šo reakciju vienmēr varam sadalīt vertikālā un horizontālā komponentē V un H. Vienkārša cilindriska locīkla ierobežo divu disku savstarpējo pārvietojumu vertikālā un horizontālā virzienā (neierobežo disku savstarpējo pagriezienu) un samazina sistēmas kustības brīvības pakāpi par divām vienībām:
Viena no galvenajām prasībām, kas tiek izvirzīta jebkurai konstrukcijai, ir prasība, lai tā saglabātu savu sākotnējo formu visā ekspluatācijas laikā. Tam atbilst ģeometriski nemainīgas sistēmas.
Par ģeometriski nemainīgu sauc sistēmu, kuras forma var mainīties tikai sistēmas elementu deformēšanās rezultātā.
att. 1Par acumirklīgi mainīgām sauc sistēmas, kuras deformēšanās sākuma momentā ir ģeometriski mainīgas un pēc tam kļūst nemainīgas. Šādām sistēmām raksturīgas lielas iekšējās piepūles un pārvietojumi.
Par ģeometriski mainīgu sauc sistēmu, kuras forma var būtiski mainīties, tās elementiem pārvietojoties vienam attiecībā pret otru vai attiecībā pret zemi, bez šo elementu deformēšanās.
att. 2Lai novērstu sistēmas ģeometrisko mainību, sistēmā jāieved papildus saites, piemēram, viens vai otrs diagonālstienis (att. 2).
Saite ir jebkura ierīce, kura ierobežo sistēmas punktu vai elementu savstarpējā stāvokļa maiņu.
Saiti, kuru atmetot, ģeometriski nemainīga sistēma kļūst par mainīgu, sauc par nepieciešamu (obligātu). Ja, atmetot kādu ģeometriski nemainīgās sistēmas saiti, sistēma paliek ģeometrisko nemainīga, tad šādu saiti sauc par lieku (neobligātu).
Saiti, kuru atmetot, ģeometriski nemainīga sistēma kļūst par mainīgu, sauc par nepieciešamu (obligātu). Ja, atmetot kādu ģeometriski nemainīgās sistēmas saiti, sistēma paliek ģeometrisko nemainīga, tad šādu saiti sauc par lieku (neobligātu).
Sistēmas kustības brīvības un mainīguma pakāpe
Par disku sauc atsevišķu sistēmas elementu, kas veido plakanu sistēmu (vienkāršs disks), veselu nemainīgu plakanu sistēmu vai tās nemainīgu daļu (paplašināts disks) vai nemainīgu pamatu.
att. 3Jebkuru disku pieņemts attēlot kā patvaļīgas formas plakanu figūru. No struktūranalīzes viedokļa 3. attēlā parādītie gadījumi ir pilnīgi analogi. Visi viņi parāda ģeometriski nemainīgu sistēmu – locīklu trīsstūri. Par cik locīklu trīsstūris (figūra A) ir ģeometriski nemainīga sistēma, mēs to varam ņemt par disku (figūra C). Tikpat labi par disku var ņemt arī katru sistēmas stieni (figūra B).
Par sistēmas kustības brīvības pakāpi (apzīmē ar W) sauc minimālo ģeometrisko parametru skaitu, kas neatkarīgi viens no otra mainās sistēmai pārvietojoties attiecībā pret zemi.
Svarīgi!
Brīva, pie zemes nepiestiprināta diska kustības brīvības pakāpe ir vienāda ar 3.
a) pirmā veida saite – stienis ar locīklām galā (att. 4). Šādā saitē var rasties reakcija stieņa ass virzienā un šāda saite ierobežo divu disku savstarpējo pārvietojumu virzienā, kas sakrīt ar stieņa virzienu. Pirmā veida saite samazina sistēmas kustības brīvības pakāpi par vienu vienību:
b) otrā veida saite – vienkārša cilindriska locīkla. Šādā saitē reakcija vispārīgā gadījumā var rasties patvaļīgā virzienā.
Šo reakciju vienmēr varam sadalīt vertikālā un horizontālā komponentē V un H. Vienkārša cilindriska locīkla ierobežo divu disku savstarpējo pārvietojumu vertikālā un horizontālā virzienā (neierobežo disku savstarpējo pagriezienu) un samazina sistēmas kustības brīvības pakāpi par divām vienībām:
 vai
vai 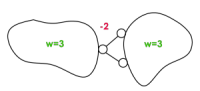
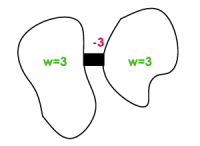
c) trešā veida saite – vienkārša stinga saite (att. 2.5d). Vienkārša stinga saite neļauj diviem diskiem pārvietoties vienam attiecībā pret otru ne vertikālā, ne horizontālā virzienā, ne arī pagriezties un samazina sistēmas kustības brīvības pakāpi par trim vienībām:
 vai
vai 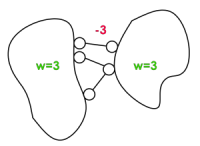
vai Svarīgi!
Rezultātā pie zemes piestiprinātas sistēmas kustības brīvības pakāpi W nosaka izteiksme:
disku skaits sistēmā | |
vienkāršo un uz vienkāršajām reducēto stingo saišu skaits | |
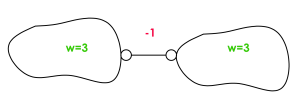
| summārais vienkāršo un uz vienkāršajām reducēto salikto locīklu skaits. To aprēķina: , kur savieno 2 diskus; savieno 3 diskus utt. | |
sistēmas stieņu skaits (tas ir tādu pirmā veida saišu skaits, kas savieno savā starpā diskus) | |
atbalststieņu skaits (tas ir tādu pirmā veida saišu skaits, kas pievieno sistēmu zemei) |
Svarīgi!
Ja apskatāmā sistēma ir brīva (nav piestiprināta pie zemes) vai zeme ir iekļauta sistēmā kā disks, sistēmai aprēķina nevis kustības brīvības pakāpi W, bet mainīguma pakāpi I (šajā gadījumā sistēmā nav atbalststieņu):
vai, ja neievērojam stingās saites:
Neatkarīgi no disku izvēles un tā, vai tiek rēķināts W vai I, iegūtais rezultāts ir viens un tas pats.
1 | I>0 W>0 | Sistēmai nav pietiekošs saišu skaits, tātad tā ir ģeometriski mainīga. |
2 | I=0 W=0 | Sistēmai ir minimāli nepieciešamais saišu skaits, lai tā būtu ģeometriski nemainīga. Taču pie nepareiza ieviesto saišu izvietojuma sistēma var kļūt ģeometriski mainīga vai acumirklīgi mainīga, tāpēc svarīgi, lai saites būtu izvietotas pareizi. Sistēmas, kurām izpildās šis noteikums, ir statiski noteicamas. Balstu reakcijas un iekšējās piepūles šādām sistēmām var noteikt pēc statikas vienādojumiem. |
3 | I<0 W<0 | Sistēmā ir tā saucamās liekās saites. Taču arī šajā gadījumā pie nepareiza saišu izvietojuma sistēma var kļūt ģeometriski mainīga vai acumirklīgi mainīga. Sistēmas, kurām izpildās šis noteikums, ir statiski nenoteicamas. Lai noteiktu balstu reakcijas un iekšējās piepūles šādām sistēmām bez statikas vienādojumiem nepieciešami arī tādi vienādojumi, kas ņem vērā sistēmas deformēšanos. |
Apvienojot otro un trešo nosacījumu, iegūstam ģeometriskās nemainības pamatnosacījumu:
Piemērs:
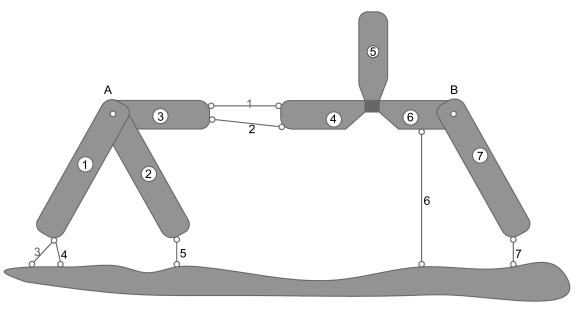
Aprēķināt dotās sistēmas kustības brīvības pakāpi!
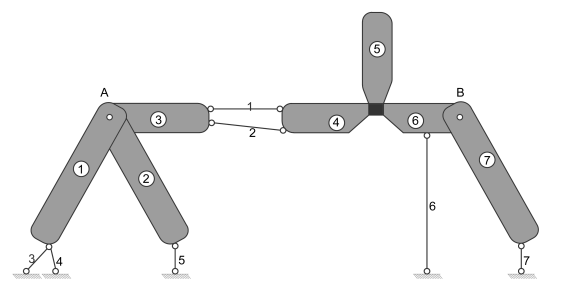
Lai noteiktu sistēmas kustības brīvības pakāpi W, sākumā pieņem, ka visi diski ir brīvi, tātad sistēmas brīvības pakāpe ir 3D. Izvietotās saites to samazina sekojošā veidā:
=
=
Šajā sistēmā disku skaits = 7 (diski 1-7);
Stingā saite savieno diskus 4, 5 un 6, tātad samazina kustības brīvības pakāpi par 2 vienībām;
Summārais vienkāršo un uz vienkāršajām reducēto salikto locīklu skaits (locīkla punktā B savieno 2 diskus, punktā A savieno 3 diskus);
Stingā saite savieno diskus 4, 5 un 6, tātad samazina kustības brīvības pakāpi par 2 vienībām;
Summārais vienkāršo un uz vienkāršajām reducēto salikto locīklu skaits (locīkla punktā B savieno 2 diskus, punktā A savieno 3 diskus);
Sistēmas stieņu skaits =2 (stieņi 1 un 2), atbalststieņu skaits = 5 (stieņi 3-7).
Lai atvieglotu aprēķinus, visus diskus , kas savienoti ar stingajām saitēm, var pieņemt par vienu paplašinātu disku, tādā gadījumā:
Analogu rezultātu iegūst, ja aprēķina mainīguma pakāpi I. Šajā gadījumā zeme ir iekļauta sistēmā kā disks, tai nav atbalststieņu:
Ņemot diskus 4, 5 un 6 par vienu paplašinātu disku, disku skaits = 6, sistēmas stieņu skaits = 7, = 3, stingo saišu nav:
Ņemot diskus 4, 5 un 6 par vienu paplašinātu disku, disku skaits = 6, sistēmas stieņu skaits = 7, = 3, stingo saišu nav:
=
Redzam, ka W = I = 2, tātad sistēmai trūkst 2 saites, lai tā būtu ģeometriski nemainīga.
- disku skaits sistēmā
- vienkāršo un uz vienkāršajām reducēto stingo saišu skaits
- summārais vienkāršo un uz vienkāršajām reducēto salikto locīklu skaits. To aprēķina: , kur savieno 2 diskus;
savieno 3 diskus utt.
- sistēmas stieņu skaits (tas ir tādu pirmā veida saišu skaits, kas savieno savā starpā diskus)
- atbalststieņu skaits (tas ir tādu pirmā veida saišu skaits, kas pievieno sistēmu zemei)
Dotajā sistēmā =, locīklu L nav, tātad statiskās nenoteicamības pakāpe:
=
Redzam, ka W = I = 2, tātad sistēmai trūkst 2 saites, lai tā būtu ģeometriski nemainīga.
Statiskās nenoteicamības pakāpe
Svarīgi!
Starpību starp ievesto un minimāli nepieciešamo saišu skaitu, lai sistēma varētu būt ģeometriski nemainīga, nosaka statiskās nenoteicamības pakāpe n:
Vienstāvīgiem rāmjiem ērtāk lietot sakarību:
Vienstāvīgiem rāmjiem ērtāk lietot sakarību:
- disku skaits sistēmā
- vienkāršo un uz vienkāršajām reducēto stingo saišu skaits
- summārais vienkāršo un uz vienkāršajām reducēto salikto locīklu skaits. To aprēķina: , kur savieno 2 diskus;
savieno 3 diskus utt.
- sistēmas stieņu skaits (tas ir tādu pirmā veida saišu skaits, kas savieno savā starpā diskus)
- atbalststieņu skaits (tas ir tādu pirmā veida saišu skaits, kas pievieno sistēmu zemei)
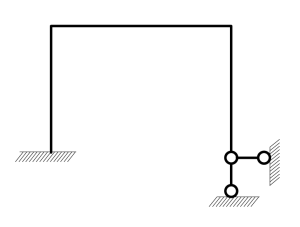
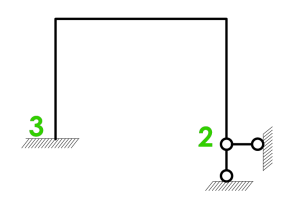
Piemērs:
Aprēķināt statiskās nenoteicamības pakāpi n dotajai sistēmai!
Dotajā sistēmā =, locīklu L nav, tātad statiskās nenoteicamības pakāpe:
=